在深度学习中,我们依赖于梯度下降和反向传播来优化神经网络。这些方法的核心,正如其名,是“梯度”。梯度指引着我们如何调整参数以最小化损失函数。但如果我们的函数在某些点上没有梯度呢?这在现代神经网络中其实非常普遍,例如广泛使用的ReLU激活函数在x=0处就是不可导的。
这时候,“次梯度”(Subgradient)的概念就显得尤为重要。幸运的是,像PyTorch这样的现代深度学习框架已经巧妙地为我们处理了这些情况。这篇博客将带你深入浅出地理解什么是次梯度。
凸函数定义
在pytorch中求次梯度的概念是针对凸函数,凸函数的定义如下:
设函数f:Rn→R∘
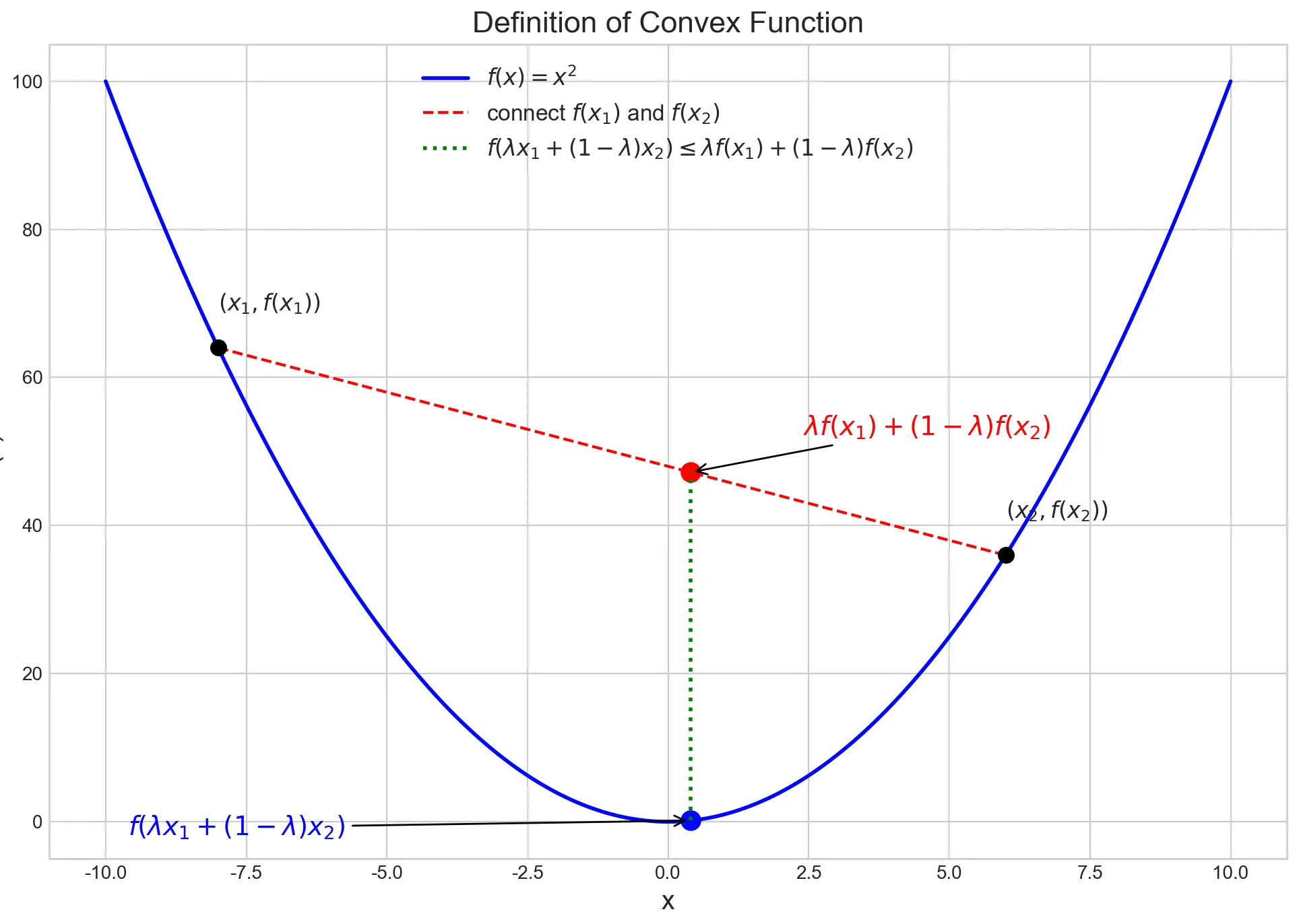
定义:如果对任意两点x1,x2以及任意 λ∈[0,1], 都有:
f(λx1+(1−λ)x2)≤λf(x1)+(1−λ)f(x2),
则称该函数是凸的。如何理解这个定义呢?
假设选定两个点x1,x2,在函数上利用λ作为一个“滑块”,控制自变量在x1,x2之间滑动,用下图表示:
满足定义则认为该函数是凸的。
在函数图像上,取两个点连成的线段,整条线段都在函数图像之上或重合。
凸函数在优化中非常重要,因为:
局部极小点就是全局极小点。
这是优化问题最核心的性质,使凸优化问题相对「好解」。
很多机器学习的目标函数(如线性回归的平方损失、逻辑回归的对数似然)都是凸的,因此便于优化。
凸函数像碗:往里放球(局部最优点),球一定会滚到最底部(全局最优点)。
凹函数像山峰:小球可能停在半山腰(局部极值),而不是山顶(全局极大)。
次梯度定义
先看凸函数梯度的特性:
对于一个在点 x 可微的凸函数 f:Rn→R,其梯度 ∇f(x) 定义了一个切面,这个切面是函数 f 的一个全局下界支撑。用公式表达就是:
f(y)≥f(x)+∇f(x)T(y−x)∀y∈Rn
这个公式意味着,从点 (x,f(x)) 出发的切线(或切面)永远不会跑到函数图像的上方。
当函数 f 在点 x 不可微时,我们无法找到唯一的梯度。但是,我们仍然可以找到满足上述不等式的向量。任何满足该条件的向量 g 都被称为函数 f 在点 x 的一个次梯度。
一个向量 g∈Rn 是 f 在 x 处的次梯度,如果对于所有的 y 都满足:
f(y)≥f(x)+gT(y−x)
在点 x 的所有次梯度的集合被称为次微分 (Subdifferential),记作 ∂f(x)。
∂f(x)={g∈Rn∣f(y)≥f(x)+gT(y−x),∀y∈Rn}
这表示梯度是一个向量,而次微分是次梯度是一个集合。
示例:绝对值函数 f(x)=∣x∣
- 当 x>0 时, f′(x)=1。次微分 ∂f(x)={1}。
- 当 x<0 时, f′(x)=−1。次微分 ∂f(x)={−1}。
- 当 x=0 时, 函数不可导。我们来找它的次梯度集合 ∂f(0)。
我们需要找到所有满足 ∣y∣≥∣0∣+g⋅(y−0) 的 g。
也就是 ∣y∣≥g⋅y。
- 如果 y>0, 我们需要 y≥g⋅y⟹1≥g。
- 如果 y<0, 我们需要 −y≥g⋅y⟹−1≤g。
综合起来,我们得到 −1≤g≤1。
所以,在 x=0 处的次微分是区间内的所有值:
∂f(0)=[−1,1]
现在我们来看pytorch对于不可微的函数如何处理:
If the function is convex (at least locally), use the sub-gradient of minimum norm
这段话表示,如果函数是凸的,使用次梯度 ∣∣g∣∣2范数最小值。
为什么选择范数最小的次梯度?
在优化算法中(如次梯度下降法),我们需要一个确定的方向来进行更新,即 xk+1=xk−αkgk,其中 gk∈∂f(xk)。
但次微分 ∂f(xk) 是一个集合,我们应该从里面选哪个 gk 呢?
原则:选择范数最小的那个次梯度。
g∗=g∈∂f(x)argmin∥g∥2
这个 g∗ 被称为最小范数次梯度 (minimum norm subgradient)。
选择它的原因:
- 最“安全”的下降方向:在所有可能的支撑超平面中,由最小范数次梯度定义的那个是最“平坦”的。在几何上,−g∗ 是在点 x 处函数 f 的最速下降方向 (steepest descent direction)。它代表了在该点附近最稳健、最保守的下降方向。
- 唯一性和确定性:次微分 ∂f(x) 是一个闭凸集,因此它有唯一的最小范数元素。这为算法提供了一个确定的、唯一的更新方向,避免了选择的模糊性。
- 与邻近算子 (Proximal Operator) 的联系:在更高级的凸优化理论中,这个选择与邻近算子紧密相关,后者是许多现代优化算法(如 ADMM、ISTA)的核心。
示例续:对于 f(x)=∣x∣ 在 x=0 处
- 次微分是 ∂f(0)=[−1,1]。
- 我们要找这个集合里L2范数(在这里就是绝对值)最小的元素。
- g∈[−1,1]argmin∣g∣=0。
- 所以,最小范数次梯度是 g∗=0。
PyTorch 如何体现这个概念?
PyTorch 的自动求导引擎 autograd 在设计时就考虑了这些不可导的函数,因为它在深度学习中太常见了(例如 ReLU)。当 backward() 在一个不可导点被调用时,它必须返回一个具体的值作为梯度,而不是一个集合。PyTorch 的实现通常会选择一个有效的次梯度,而这个选择往往恰好是(或等价于)那个范数最小的次梯度。
示例 1: ReLU 函数
- 函数: f(x)=ReLU(x)=max(0,x)
- 在 x>0 时, f′(x)=1。
- 在 x<0 时, f′(x)=0。
- 在 x=0 时, 次微分是 ∂f(0)=[0,1]。
- 最小范数次梯度: g∈[0,1]argmin∣g∣=0。
我们用 PyTorch 代码验证:
import torch
x = torch.tensor(0.0, requires_grad=True)
y = torch.relu(x)
y.backward()
print(x.grad)
输出:
tensor(0.)
PyTorch 在 x=0 处为 ReLU 的梯度选择了 0,这正是最小范数次梯度。
示例 2: L1 范数 (torch.abs)
- 我们已经知道 f(x)=∣x∣ 在 x=0 处的次微分是 ∂f(0)=[−1,1]。
- 最小范数次梯度: g∗=0。
PyTorch 代码验证:
import torch
x = torch.tensor(0.0, requires_grad=True)
y = torch.abs(x)
y.backward()
print(x.grad)
输出:
tensor(0.)
同样,PyTorch 选择了 0。
示例 3: 多维最大值函数 (torch.max)
这是一个更复杂的例子,能更好地展示这个原则。
-
函数: f(x1,x2)=max(x1,x2)
-
当 x1>x2 时, ∇f=[1,0]T。
-
当 x2>x1 时, ∇f=[0,1]T。
-
当 x1=x2=a 时, 函数不可导。
此时的次微分是两个梯度向量的凸包 (convex hull):
∂f(a,a)=conv({[1,0]T,[0,1]T})={g=[λ,1−λ]T∣0≤λ≤1}
-
寻找最小范数次梯度: 我们要求解
0≤λ≤1argmin∥[λ,1−λ]T∥22=0≤λ≤1argmin(λ2+(1−λ)2)
对 λ2+(1−λ)2 求关于 λ 的导数并令其为0,得到 2λ−2(1−λ)=0⟹4λ=2⟹λ=0.5。
这个解在 [0,1] 区间内,所以是最小值点。
-
最小范数次梯度是 g∗=[0.5,0.5]T。
PyTorch 代码验证:
import torch
x = torch.tensor([2.0, 2.0], requires_grad=True)
y = torch.max(x)
y.backward()
print(x.grad)
输出:
tensor([0.5000, 0.5000])
PyTorch 的计算结果完美地符合了最小范数次梯度的理论!