目录
在计算机视觉领域,目标检测(Object Detection)是一个核心且极具挑战性的任务。在2015年之前,以R-CNN系列(R-CNN, Fast R-CNN, Faster R-CNN)为代表的检测算法占据了主导地位。它们通过一个复杂且多阶段的流程来实现高精度检测:首先生成潜在的候选区域(Region Proposal),然后对这些区域进行分类和位置精修。这个流程虽然精确,但速度却是一个巨大的瓶颈,难以满足实时应用的需求。
就在这时,一篇名为《You Only Look Once: Unified, Real-Time Object Detection》的论文横空出世,彻底改变了游戏规则。Joseph Redmon等人提出的YOLO(You Only Look Once)框架,只需要一次就可以同时回归类别和目标位置。
论文核心思想
YOLO 将目标检测任务重新定义为一个单一的回归问题。它将输入的图像送入一个单独的神经网络,该网络直接输出所有目标的边界框坐标、置信度以及类别概率。整个过程只需要一次前向传播,因此速度极快。这就是 "You Only Look Once" 名字的由来。
模型结构和计算
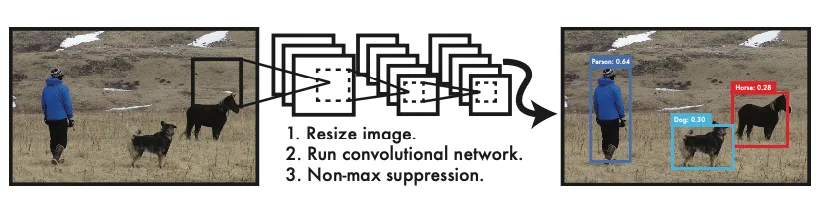
yolo的计算流程分为3个阶段,一是缩放到网络输入的张量尺寸,二是模型推理,最后采用非极大值抑制(NMS)算法保留检测框。流程如图:
我们来看一下yolo模型的架构,yolo1的年代比较早,其实模型结构也非常简单,如图:
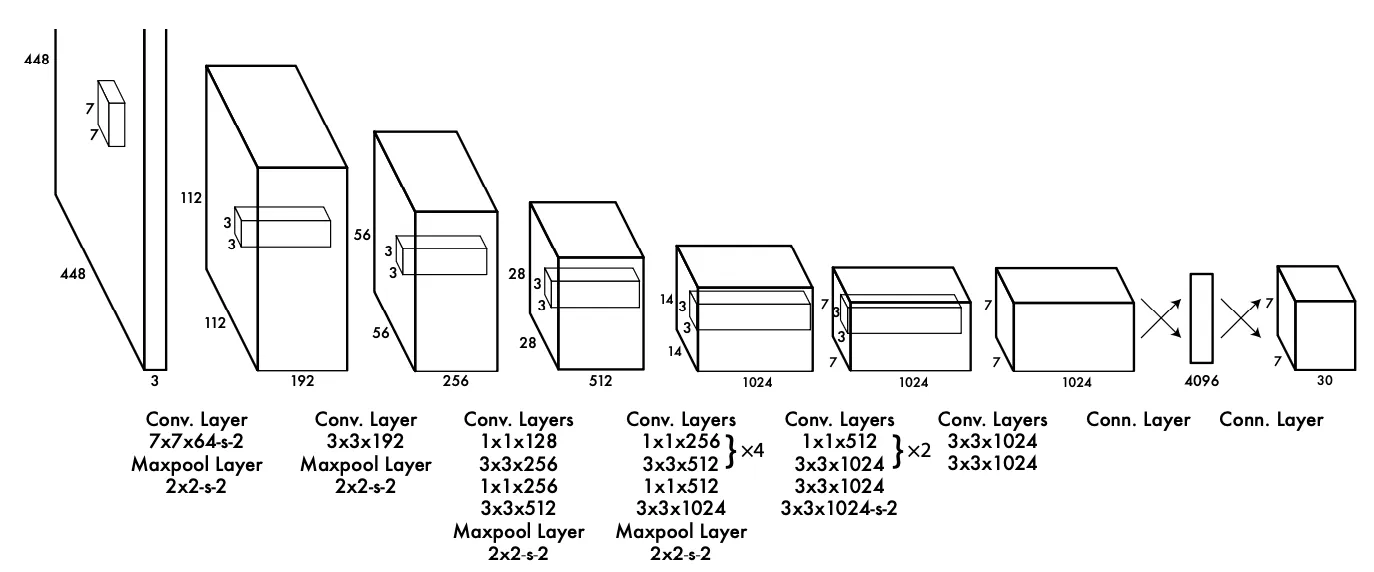
从图中可以看到,仅由卷积和全连接层构成,重点在于输出的这个张量。是一个7x7x30的形状。接下来重点解析这个输出构成和损失函数的定义。
图中的7x7是因为将图像进行的划分,划分成了7x7个cell。30是由20个class组成的类别概率分布,剩下10个,是由B=2个检测器输出的回归信息,分别是, 分别表示框的中心坐标和长宽,以及置信度。置信度的计算方式是真实边框和预测边框的Iou值
the confidence prediction represents the IOU between the predicted box and any ground truth box.
数据集制作
要明白上面最终输出的张量形状含义,最好的方式就是制作一个标注的数据集。下面将介绍如何从标注到张量的构造: 假设我们有一张输入图片,以及它对应的标注信息。一个物体的标注信息通常包含:
类别 (Class ID):例如,“狗”的类别 ID 是 16。 边界框 (Bounding Box):通常是 [x_center, y_center, width, height] 的形式,这些值是相对于整张图片尺寸归一化后的结果(即都在 0 到 1 之间)。
YOLO 的目标是生成一个 的目标张量(Ground Truth Tensor),这个张量将作为“正确答案”与网络预测的张量进行比较,从而计算损失。我们以论文中的标准配置为例:。目标张量的大小就是 . 其中:
- :划分的网格数量
- : 每个网格的检测器数量
- : 类别数量
第一步:确定“负责”的网格单元
对于图中的每一个物体(Ground Truth Object),我们查看其中心点 (x_center, y_center) 的坐标。
将归一化的中心点坐标乘以网格尺寸,得到它在中的绝对位置:
取这两个值的整数部分,就得到了该物体所在的网格单元的索引 :
这个位置的网格单元,就是唯一负责预测这个物体的单元。
第 2 步:转换边界框坐标
YOLO 预测的 (x, y) 坐标不是相对于整张图的,而是相对于其所在的网格单元左上角的偏移量。因此,我们也需要将真实的(x_center, y_center) 转换成这种相对坐标:
和 的值也会在 0 到 1 之间。 而边界框的宽高 (width, height) 不需要转换,它们仍然是相对于整张图片尺寸的归一化值。
第 3 步:构建目标向量
现在我们已经确定了负责的网格单元 (grid_row, grid_col),并且计算好了所需的坐标。接下来,我们要填充这个单元对应的长度为 的目标向量。
1.坐标 (x, y, w, h):将我们在第 2 步计算出的 x_offset, y_offset 和原始的 width, height 填入。因为每个单元预测 B (这里是2) 个框,但只有一个物体,所以理论上我们只需要填充一个框的信息。在实践中,通常会将这些坐标信息同时填充到 B 个预测框的位置。损失函数中的会确保只有那个和真实框 IoU 最高的预测框才参与坐标损失的计算。
- target_vector[0:4] = [x_offset, y_offset, width, height]
- target_vector[5:9] = [x_offset, y_offset, width, height]
2.置信度 (Confidence):对于这个负责检测物体的网格单元,其置信度的目标值是 1。这意味着我们确信这个地方有物体。对于图像中所有其他不包含物体中心的网格单元,它们对应的所有边界框的置信度目标值都是 0。
- target_vector[4] = 1
- target_vector[9] = 1
3.类别概率 (Class Probabilities):这是一个长度为 C (这里是20) 的向量。我们使用 one-hot 编码。如果该物体的类别 ID 是 16,那么向量的第 16 个元素为 1,其余均为 0。
这个映射过程也解释了 YOLOv1 的一个核心局限性: 每个网格单元只能预测一个物体。如果两个物体的中心点不幸落在了同一个网格单元内,那么在构建目标张量时,后一个物体的信息会覆盖前一个。模型在训练时只会看到其中一个物体,因此也无法学会同时预测它们。这就是为什么 YOLOv1 对密集的小物体(如一群鸟)检测效果不佳的原因。后续版本如 YOLOv2/v3 通过引入 Anchor Box 机制来解决这个问题。
损失函数计算
OLO 的训练核心在于其精心设计的多部分损失函数(Loss Function)。这个损失函数是一个加权和,包含了定位误差、置信度误差和分类误差。
损失函数由以下几个部分组成,它是一个在所有网格单元和每个单元的预测框上求和的均方差(Sum-Squared Error):
公式符号解释:
- :是一个指示函数,如果第 i个网格单元的第 j个边界框负责预测这个物体(通常是与真实框 IoU 最大的那个预测框),它的值为 1,否则为 0。
- 是一个指示函数,如果第
i个网格单元中存在物体中心,则其值为 1,否则为 0。 - 如果第 i个单元的第 j个框不包含物体,值为 1。表示该预测器不负责预测物体。
损失函数详解:
1.坐标预测损失 (Localization Loss):公式的前两行。它只计算那些负责检测物体的预测框: 的坐标误差。对宽高(w, h)取平方根:这是为了解决一个问题——对于大框和小框,同样的坐标偏差,其影响是不同的。例如,一个大框的宽度偏差 10 个像素可能不明显,但对一个小框来说可能是致命的。通过对宽高取平方根,可以减小大框的梯度,增加小框的梯度,使得模型对小框的尺寸误差更敏感。
2.置信度损失 (Confidence Loss):公式的第三、四行。这部分分为两种情况:
- 包含物体的框(第三行):计算其置信度与真实置信度(即预测框与真实框的 IoU)之间的误差。
- 不包含物体的框(第四行):计算其置信度与0的误差由于图像中大部分网格都不包含物体,这部分样本数量远多于包含物体的样本。为了平衡样本不均的问题,给不包含物体的框的置信度损失一个较小的权重。论文中设为 0.5
3.分类损失 (Classification Loss):公式的最后一行。它只计算那些包含物体中心的网格单元的分类误差。对该单元预测的类别概率向量与真实类别向量计算均方差。
NMS算法
由于每个网格都有B个检测器,一共有个网格,所以推理完毕后存在大量冗余的检测框,为了去除掉这些重复的检测框,就需要用到非极大值抑制算法。这里简单讲解一下算法执行的原理:
简答来说就是 “保留分数最高的框,并删除与它高度重叠的其他框。”
在NMS中,我们会预先设定一个IoU阈值(Threshold),比如0.5。如果两个框的IoU大于这个阈值,我们就认为它们“高度重叠”,即检测的是同一个物体。
假设我们有N个候选框,以及它们各自的置信度分数。 输入:
- B: 所有候选框的列表,每个框包含坐标信息 (x1, y1, x2, y2)。
- S: 对应每个候选框的置信度分数列表。
- N_t: IoU阈值(例如 0.5)。
输出:
D: 经过NMS筛选后保留下来的最终边界框列表。
按置信度排序:将所有候选框 B 按照它们的置信度分数 S 从高到低进行排序。
初始化:创建一个空列表 D,用于存放最终结果。
循环处理:当 B 不为空时,执行以下循环:
- a. 选出最佳框:从 B 中选择置信度最高的框 M,将其从 B 中移除,并添加到最终结果列表 D 中。
- b. 计算IoU:遍历 B 中剩余的所有框 b_i,分别计算它们与框 M 的IoU值。
- c. 抑制重叠框:检查每个 b_i 与 M 的IoU值。如果 IoU(M, b_i) > N_t,则将 b_i 从 B 中移除。因为我们认为 b_i 和 M 检测的是同一个物体,而 M 的分数更高,所以 b_i 应该被抑制。
重复:回到第3步,继续从剩余的 B 中选择分数最高的框,并重复上述过程,直到 B 为空。 返回结果:返回列表 D,这就是NMS处理后的最终检测框。
⚠️注意:NMS算法针对的是同一类的检测框,NMS通常是按类别独立执行的。 这里的置信度分数计算方式:
其中P(Object) 表示物体置信度:这个边界框里包含一个物体的可能性有多大? P(Class_i | Object)表示类别条件概率:假如这个框里确实有物体,那么它属于各个类别(如‘猫’、‘狗’、‘汽车’)的概率。
本文作者:James
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!