目录
在自动驾驶、机器人和无人机等领域,激光雷达(LiDAR)和相机(Camera)是最常见的两类传感器。激光雷达擅长提供精确的三维空间几何信息,相机则能提供丰富的纹理与颜色信息。为了充分发挥两者优势,我们需要将它们的坐标系统一,这一过程被称为激光雷达与相机联合标定(LiDAR-Camera Calibration)。 本文将详细介绍标定流程和标定结果分析。
标定流程
数据处理代码

标定测试
标定结果分析
联合标定分析

根据上图我们可以看到一共有三个子图,它通过三个关键指标来展示标定结果的优劣:平移误差(Translation Errors)、旋转误差(Rotation Errors) 和 重投影误差(Reprojection Errors)。 在分析之前,我们先理解这三个图的含义:
- X轴(Image - Point Cloud Pairs):代表你采集的每一对有效的标定数据。每一对数据都是一个棋盘格(或其他标定板)在某一特定位置和姿态下,被相机和激光雷达同时捕捉到的结果。例如,X轴上的“2”就代表第二组标定板数据。
- Y轴(Error):代表该组数据的误差大小。误差越小,说明这组数据质量越高,也说明最终计算出的标定参数对这组数据拟合得越好。
- 深蓝色条:代表当前选中的数据对。
- 浅蓝色条:代表其他未选中的数据对。
- 红色区域(Drag to select outliers):这是一个交互功能,你可以拖动红线,将红线以上的误差条标记为“离群点”(Outliers)。剔除这些误差过大的离群点后,工具会重新计算一个更精确的标定结果。
- 平移误差(Translation Errors)
这个图显示的是标定板在三维空间中的位置误差。它计算的是,根据标定结果(外参矩阵),将激光雷达检测到的标定板平面位置转换到相机坐标系后,与相机直接检测到的标定板平面位置之间的物理距离差异。 单位:米(meters)。
从图上看,平移误差绝大部分都在0.02米(2厘米)以下,最大值约为0.035米(3.5厘米)。整体平均误差看起来在1-2厘米左右。对于自动驾驶,厘米级精度足够了。
- 旋转误差(Rotation Errors)
这个图显示的是标定板在三维空间中的姿态误差。它计算的是,激光雷达检测到的标定板平面法向量与相机检测到的平面法向量,在经过旋转矩阵转换后的角度差异。单位:度(degrees)。
越接近0越好。通常认为误差在1度以内是比较好的结果,0.5度以内则非常优秀。
- 重投影误差(Reprojection Errors)
这是最重要、最综合的一个评估指标。它描述的是:将激光雷达点云中标定板的角点,通过你计算出的内外参矩阵投影回相机成像平面上,这个投影点与相机图像上实际检测到的角点之间的像素距离。它同时反映了平移、旋转和相机内参的综合误差。单位:像素(pixels)。
越接近0越好。对于一个百万像素级别(如1920x1080)的相机,平均重投影误差在1-2个像素以内被认为是优秀的结果,5个像素以内通常可以接受,超过10个像素则说明标定质量较差。
图像标定参数结果分析
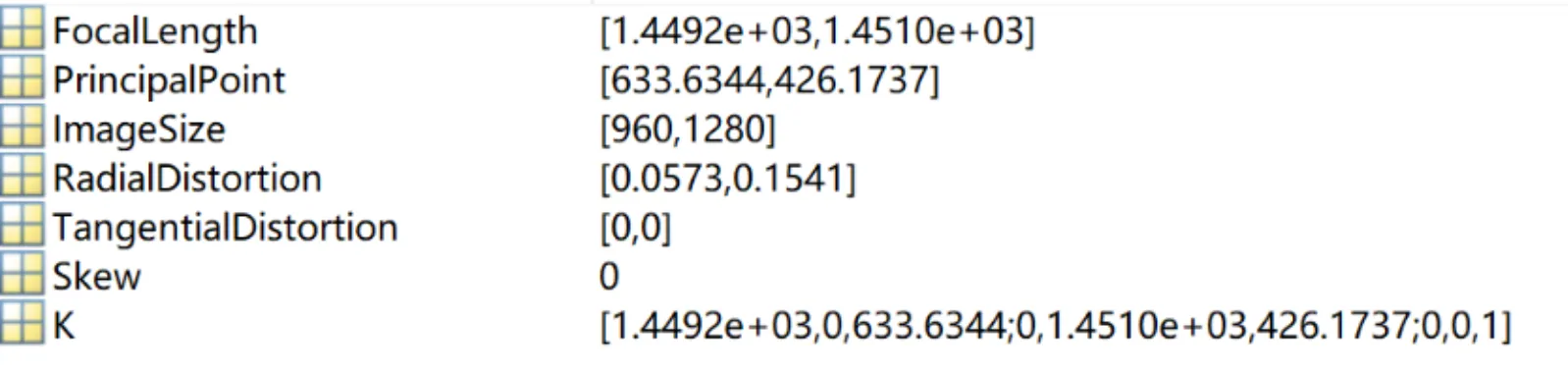
这张图展示的是相机标定后得到的 内参(Intrinsic Parameters) 结果
- 焦距 (FocalLength)
这表示相机的焦距,但它的单位是像素,而不是毫米。它包含两个值:fx 和 fy。 fx 和 fy 分别是x轴和y轴方向上的焦距。在理想情况下,相机传感器的像素是正方形的,此时 fx 和 fy 会非常接近。你的结果中这两个值非常接近,说明像素几乎是正方形的,这是一个高质量传感器的典型特征。
焦距值决定了相机的视场角(Field of View)。值越大,视场角越窄(类似长焦镜头);值越小,视场角越宽(类似广角镜头)。
- 主点 (PrincipalPoint)
这是相机光轴与成像平面的交点,也称为图像的“光学中心”。它包含两个值:cx 和 cy。 cx = 633.6344 像素 cy = 426.1737 像素
理想情况下,主点应该位于图像的正中心。你的图像尺寸(ImageSize)是 [960, 1280],即高960像素,宽1280像素。 图像的物理中心是 (1280 / 2, 960 / 2) = (640, 480)。 主点 (633.6, 426.2) 与物理中心 (640, 480) 非常接近。这个微小的偏差是完全正常的,由镜头和传感器安装时的微小误差造成。这同样表明相机硬件质量不错。
- 径向畸变 (RadialDistortion)
这是描述镜头径向畸变的系数,通常表示为 [k1, k2, ...]。径向畸变是由于镜头透镜的形状引起的,会导致图像中的直线在靠近边缘处变弯曲。 k1 = 0.0573 k2 = 0.1541
桶形畸变 (Barrel Distortion): 当 k1 为正值时,图像向外凸出,像一个木桶。 枕形畸变 (Pincushion Distortion): 当 k1 为负值时,图像向内凹陷,像一个枕头。 我的 k1 是正数,说相机镜头存在轻微的桶形畸变。这在消费级和工业相机中非常常见。这些系数是用来在后续处理中校正这种畸变的。
- 切向畸变 (TangentialDistortion)
这是描述镜头切向畸变的系数,通常表示为 [p1, p2]。这种畸变是由于镜头和成像平面不完全平行造成的。 我的结果是 [0, 0],说明标定算法认为切向畸变可以忽略不计。这是一个非常好的结果,表明相机镜头安装得很好,与传感器平面非常平行。
- 倾斜系数 (Skew)
这个参数描述了图像传感器x轴和y轴之间的倾斜程度。 对于现代的数字相机,像素阵列的x和y轴几乎总是完美的90度垂直,所以这个值几乎永远是0。结果是0,符合预期。
- 内参矩阵 (K)
这是所有核心内参的集合体,是一个3x3的矩阵。它将一个在相机坐标系下的三维点 (X, Y, Z) 映射到成像平面上的二维像素坐标 (u, v)。 这个矩阵完美地整合了上面我们分析的各个参数。
参考
相关资料参考:
【1】https://www.mathworks.com/help/lidar/ug/read-lidar-and-camera-data-from-rosbag.html
【2】https://www.mathworks.com/help/lidar/ug/lidar-and-camera-calibration.html
本文作者:James
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!