目录
近年来,点云理解在自动驾驶、机器人感知、增强现实等领域具有广泛应用。然而,点云标注数据昂贵且有限,制约了点云深度学习的发展。相比之下,图像领域有大量标注数据和强大的预训练模型,尤其是 CLIP(Contrastive Language-Image Pre-training),通过对齐图像与文本表示,展现了卓越的零样本识别能力。 论文 PointCLIP 提出了一个核心问题: 能否将强大的 图像-文本多模态模型 CLIP 迁移到 点云理解 中,而无需大规模点云标注数据?
论文核心思想
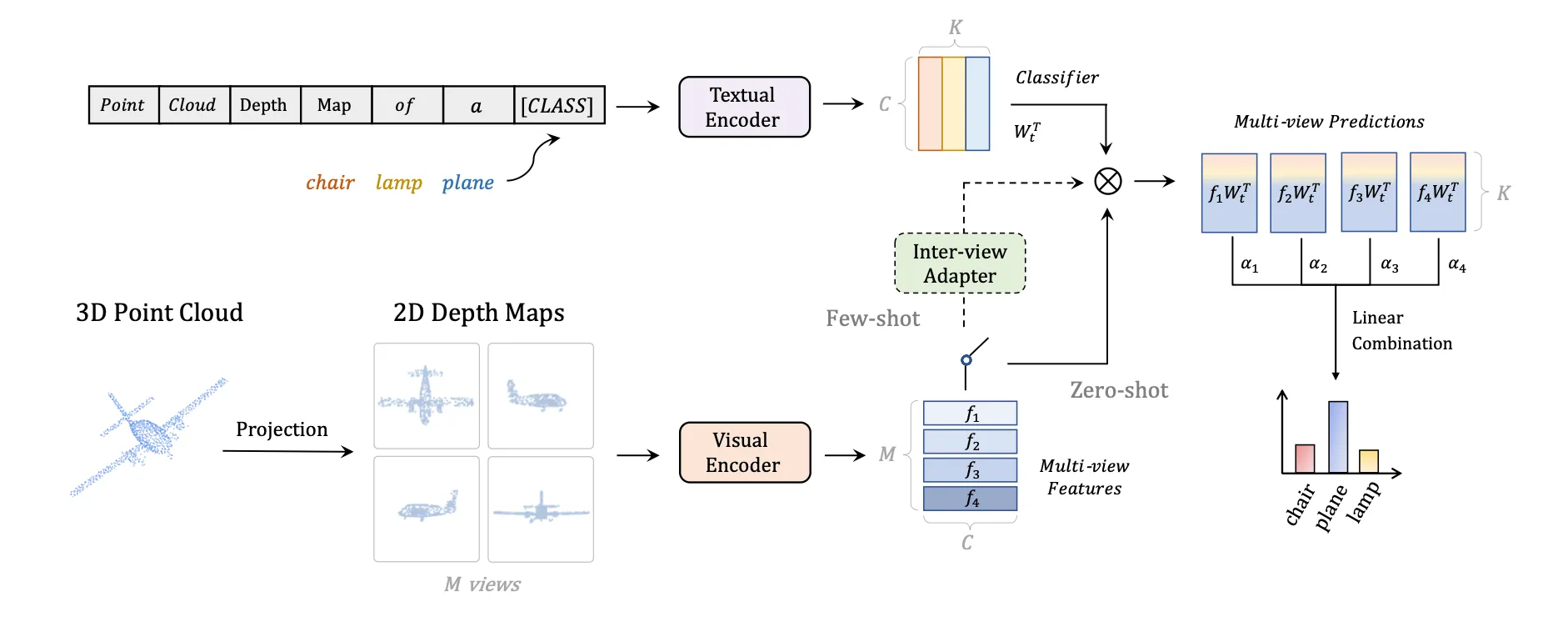
将点云投影为多视角图像,再利用 CLIP 的图像编码器与文本编码器进行对齐,从而实现点云的零样本识别。
将3D点云这种CLIP模型看不懂的“语言”,翻译成了CLIP能理解的2D图像“语言”。具体来说,它通过将3D点云投影(渲染)成一系列多视角的2D深度图(Depth Map),然后利用预训练好的CLIP模型强大的2D图像与文本匹配能力,来实现对3D点云的零样本(Zero-shot)和少样本(Few-shot)分类。
如图所示:
方法流程
1.点云到多视图深度图的投影 (Point Cloud to Multi-view Depth Map Projection)
为了完整地捕捉物体的三维结构,PointCLIP设置了多个固定的虚拟相机视角。最常用的方法是6个正交视图(前、后、左、右、上、下),就像把物体放在一个盒子里,从六个面朝里看。有时也会使用更多(如12个)的icosahedral(二十面体)视图。
对于每个视角,将点云的所有点(x, y, z)投影到该视角的2D平面上。对于2D平面上的每个像素,其值被设为落入该像素的所有3D点中,离相机最近的那个点的深度值。这就形成了一张深度图。
2.文本与视觉编码 (Text & Visual Encoding)
首先,构建一系列“提示模板” (Prompt Template)。例如,对于一个分类任务,类别有“飞机 (airplane)”、“椅子 (chair)”等。模板通常是 “a depth map of a [CLASS]”。 将所有类别名填入模板,形成 “a depth map of an airplane”, “a depth map of a chair” 等一系列句子。 然后,将这些句子输入到CLIP的文本编码器中,得到每个类别对应的文本特征向量 (Text Features)。这个过程只需要做一次。
将上一步生成的每一张深度图,像普通图片一样,输入到CLIP的视觉编码器中。 得到每一张深度图对应的视觉特征向量 (Visual Features)。如果一个点云生成了6张深度图,就会得到6个视觉特征向量。
3.零样本分类 (Zero-shot Classification)
对于某一张深度图的视觉特征,计算它与所有类别的文本特征之间的余弦相似度 (Cosine Similarity)。 单视图预测: 相似度最高的那个文本特征所对应的类别,就是这张深度图的预测结果。 现在我们有多个视图的预测结果(例如6个)。PointCLIP通过简单的投票 (Voting) 或对相似度分数进行平均,来决定整个3D点云的最终预测类别。这种集成策略可以有效减少因单一视角信息不完整而导致的错误。
少样本微调适配器
虽然零样本能力已经很惊艳,但在有少量标注数据(如每个类别只有1、2、4、8、16个样本)时,我们希望能进一步提升性能。 如果直接微调(Fine-tuning)整个CLIP模型,不仅参数量巨大,而且容易导致模型在海量2D数据上学到的知识被遗忘(即灾难性遗忘 Catastrophic Forgetting),反而损害其泛化能力。
PointCLIP引入了一个轻量级的适配器 (Adapter) 模块。如图:
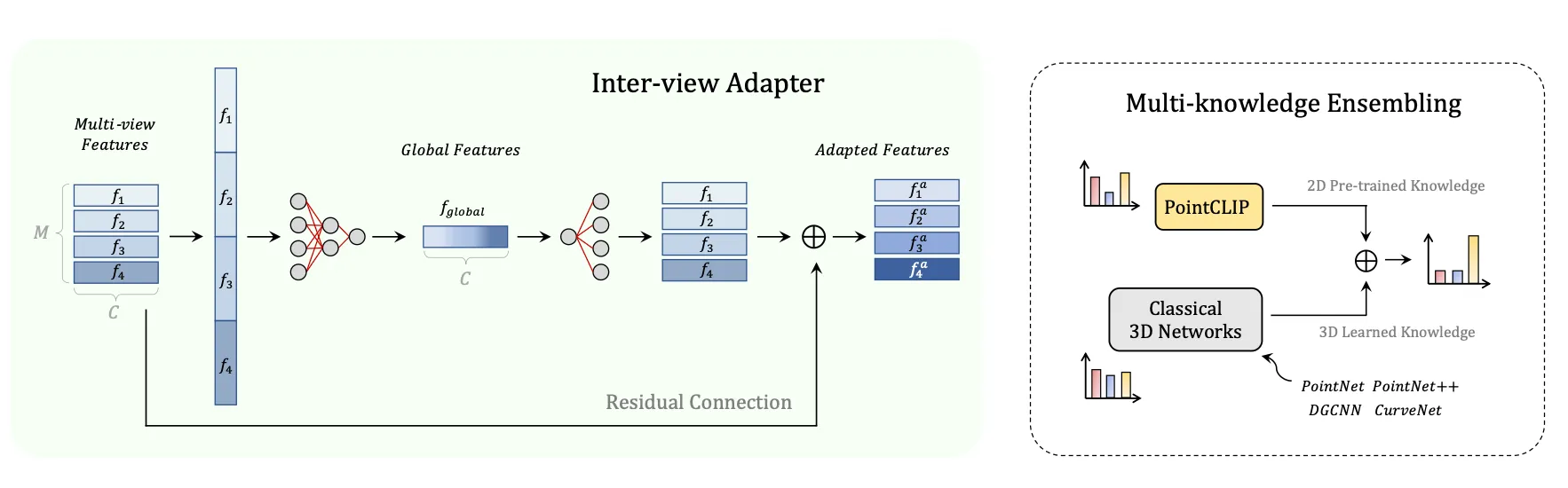
Adapter的作用是学习一个“残差”或者说“调整量”。它在不改变CLIP原有知识结构的基础上,对特征进行微小的、任务相关的调整,使其更好地适应从深度图提取的特征。这样既能利用少量3D数据提升性能,又能最大程度地保留CLIP的泛化能力。
Adapter的设计上参考了llm模型的FFN结构,将特征先升维再降维,相当于一次过滤器,将难以过滤的特征在高维上过滤后再恢复到原来的维度。降维会损失信息,但是损失的是对于任务无关的信息。
本文作者:James
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!