本文将简述常见的空间变换矩阵和相关公式推导。
1️⃣三种基本变换:平移、旋转和缩放
我们先尝试只用3x3矩阵来表示这些变换。这种方式很容易让人接受【但计算机没那么喜欢】
- 缩放(Scale): 可以完美地用3x3矩阵表示。
⎣⎡Sx000Sy000Sz⎦⎤⎣⎡xyz⎦⎤=⎣⎡Sx⋅xSy⋅ySz⋅z⎦⎤
- 旋转(Rotation): 也可以完美地用3x3矩阵表示(例如绕Z轴旋转)。
⎣⎡cosθsinθ0−sinθcosθ0001⎦⎤⎣⎡xyz⎦⎤=⎣⎡xcosθ−ysinθxsinθ+ycosθz⎦⎤
- 平移:我们无法找到一个3x3矩阵使得M⋅v=v+t∘
因为矩阵乘法是线性变换(输出是输入的线性组合),而平移是仿射变换,它有一个常量偏移。你无法通过 ax+by+cz 这种形式来得到 x+Tx。
在引入齐次矩阵前,先推导一下旋转矩阵的得来:
假设在2D平面中有一个点 P(x,y),我们将其绕原点逆时针旋转角度 θ得到新点 P′(x′,y′)。设点 P 到原点的距离为 r与 x 轴的夹角为 α,则有:
x=rcosα,y=rsinα
旋转后:
x′=rcos(α+θ),y′=rsin(α+θ)
利用三角函数公式展开:
x′=r(cosαcosθ−sinαsinθ)=xcosθ−ysinθy′=r(sinαcosθ+cosαsinθ)=xsinθ+ycosθ
写成矩阵形式:
[x′y′]=[cosθsinθ−sinθcosθ][xy]
因此,2D旋转矩阵为:
R(θ)=[cosθsinθ−sinθcosθ]
平移与齐次坐标
3x3矩阵无法表示平移变换。为了解决这个问题,数学家们想出了一个巧妙的办法:将3D向量升维到4D空间。这就是齐次坐标。
一个3D点在齐次坐标系下表示为(x,y,z,w),其中 w 是一个分量。
⎣⎡100001000010TxTyTz1⎦⎤⎣⎡xyz1⎦⎤=⎣⎡x+Txy+Tyz+Tz1⎦⎤
通过引入齐次矩阵,解决了平移的问题,为什么要用乘法而不是直接用加法,目的是为了统一这三种基本变换的算子,让计算机做连续的矩阵乘法。可以将多次变换提前计算出来,存储为一个齐次矩阵。
2️⃣ 矩阵变换实际应用
在计算机图形学中,矩阵变换是最常用的,下面以opengl为例子,讲述矩阵变换的实际应用场景。
首先我们需要明白:
空间变换
要用一个矩阵把向量从“空间 A”变到“空间 B”,核心就是:要知道空间 B 的“坐标轴”在空间 A 里长什么样,再加上(如果需要的话)原点怎么平移。
首先看一下opengl的坐标变换体系:
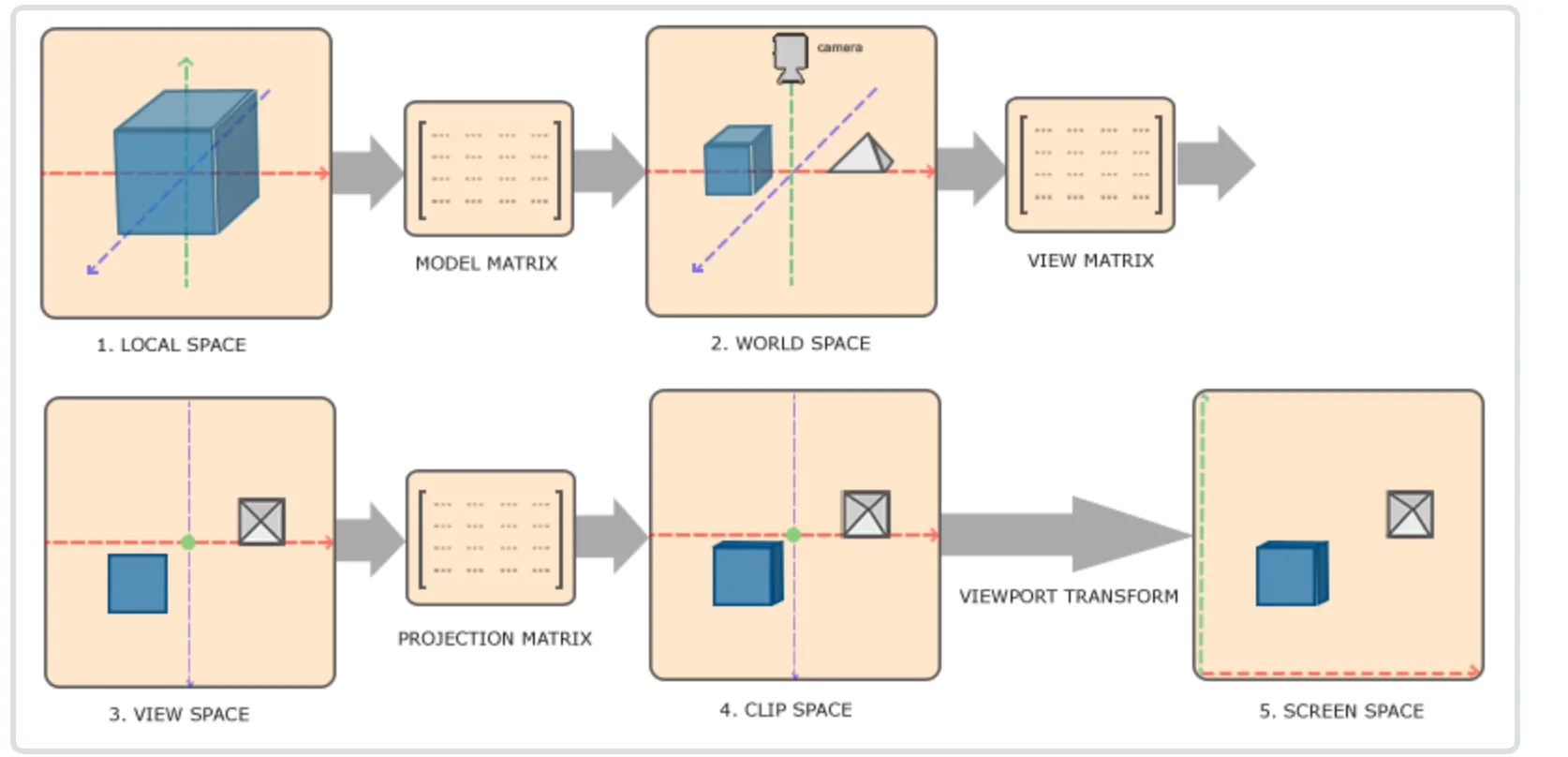
局部空间到世界空间
这一步非常好理解,局部空间主要是存放模型的顶点,原点:通常是模型的几何中心或某个参考点。
通常会标准化到 [-1, 1] 范围。
Model矩阵的意义就是定义模型在世界空间的尺寸和位姿,在model矩阵中填入模型的rotate,scale和tranlate 组成model矩阵。
局部空间到观察空间
这里涉及的主要知识就是线形代数中的基变换。
本质:向量不变,基向量变了,所以坐标(系数)必须变。
矩阵 P:由新基向量在旧系中的坐标作为列组成。
口诀:
- 新 → 旧:直接乘 P (Pxnew=xold)
- 旧 → 新:乘逆矩阵 P−1 (xnew=P−1xold)
在 OpenGL 或计算机图形学中,从世界坐标(World Space)变换到相机坐标(Camera/View Space) 是“坐标变换”最经典、最实用的例子。
这个变换通常由 视图矩阵(View Matrix) 完成。
我们将利用上一节提到的**“Old → New 需要逆矩阵”**的理论来一步步推导这个过程。
1. 场景设定与直观理解
设定
- 旧坐标系(世界坐标):绝对的 (0,0,0),基向量是标准的 X,Y,Z。
- 新坐标系(相机坐标):以相机为中心,相机永远觉得自己是在原点 (0,0,0),看向 −Z 轴(OpenGL右手系标准)。
- 物体:一个茶壶放在世界坐标 (10,5,3) 的位置。
- 相机:放在世界坐标 (0,5,10) 的位置,看向茶壶。
直观理解:相对运动
在图形学中,移动相机太麻烦了(因为屏幕是死的),所以我们采用**“逆向思维”**:
不移动相机,而是反向移动整个世界。
如果你想把相机向右移 5 米,等同于把世界里所有的物体向左移 5 米。
这就解释了为什么我们需要计算**“逆(Inverse)”**。
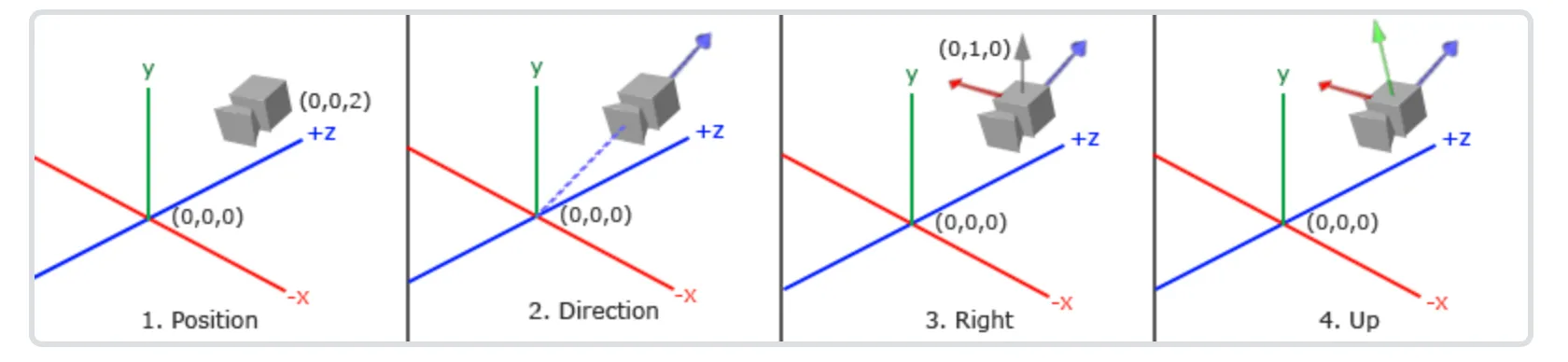
2. 构建相机的“基向量”(UVN系统)
首先,我们需要知道新坐标系(相机)长什么样。通常我们使用 gluLookAt(eye, center, up) 函数来定义:
- Eye (相机位置): Peye
- Center (看向哪里): Ptarget
- Up (世界的大致上方): upworld (通常是 0,1,0)
提示
定义相机的Position,Target,Up 本质上就是构建新的坐标的基向量,也是构建过渡矩阵
我们需要构建相机的三个正交基向量(Right, Up, Direction):
- Z轴(方向轴 f):
在OpenGL中,相机看向 −Z 方向,所以 +Z 指向相机的背后。
zcam=normalize(Peye−Ptarget)
- X轴(右轴 r):
利用叉乘(Cross Product)。右轴垂直于“上方向”和“Z轴”。
xcam=normalize(upworld×zcam)
- Y轴(上轴 u):
垂直于已经算出来的 Z 和 X。
ycam=zcam×xcam
现在,我们有了新坐标系的基向量:r,u,f。
这里根据rgb颜色观察相机的x,y,z轴
3. 矩阵推导:平移与旋转
我们要把一个点 Pworld 变成 Pcamera。
公式是:
Pcamera=ViewMatrix⋅Pworld
这个变换分为两步:先平移(把相机移回原点),再旋转(把相机的朝向对准坐标轴)。
第一步:平移矩阵 T
相机当前在 Peye=(xe,ye,ze)。
要把相机移回世界原点 (0,0,0),我们需要平移 (−xe,−ye,−ze)。
T=⎣⎡100001000010−xe−ye−ze1⎦⎤
第二步:旋转矩阵 R(核心应用!)
这里是应用我们之前理论的关键点。
我们知道旋转矩阵 Rorientation 的列应该是新基向量(相机的 r,u,f)在世界坐标下的值。
Rorientation=⎣⎡∣r∣0∣u∣0∣f∣00001⎦⎤
但是! 上面这个矩阵代表的是 Camera → World 的变换(把相机坐标转成世界坐标)。
正如第一部分理论所说:已知旧坐标求新坐标(World → Camera),需要乘以逆矩阵 P−1。
线性代数的小魔法:
对于纯旋转矩阵(正交矩阵),逆矩阵等于转置矩阵(Inverse = Transpose)。
所以,我们不需要辛苦算逆,直接把行变成列即可:
R=(Rorientation)−1=(Rorientation)T=⎣⎡−−−0ruf0−−−00001⎦⎤=⎣⎡rxuxfx0ryuyfy0rzuzfz00001⎦⎤
(注意:这里的基向量现在横着躺在了行里)
4. 最终的视图矩阵 (View Matrix)
将两步合起来(先平移,再旋转,注意矩阵乘法顺序是从右向左):
ViewMatrix=R⋅T
ViewMatrix=⎣⎡rxuxfx0ryuyfy0rzuzfz00001⎦⎤⋅⎣⎡100001000010−xe−ye−ze1⎦⎤
计算结果就是经典的 LookAt Matrix:
⎣⎡rxuxfx0ryuyfy0rzuzfz0−r⋅Peye−u⋅Peye−f⋅Peye1⎦⎤
(注:最后的一列实际上就是 −r⋅Peye,也就是平移向量在新基向量上的投影)
5. 总结与举例验证
假设:
- 相机位置:(0,0,5)
- 看向:(0,0,0)
- 上方:(0,1,0)
- 世界中有一个点:Pworld=(0,0,2)
人脑直观推测:
相机在 z=5 看向原点,点在 z=2。对相机来说,这个点在它前方 3 米处。因为相机看的是 −Z 方向,所以在相机坐标系里,这个点的坐标应该是 (0,0,−3)。
利用矩阵计算:
-
基向量:
- f=(0,0,1) (指向相机背后)
- r=(1,0,0)
- u=(0,1,0)
-
旋转矩阵 R (转置后还是它自己,因为是对角阵):单位矩阵。
-
平移矩阵 T:z 轴平移 −5。
-
运算:
Pcam=⎣⎡10000100001000−51⎦⎤⎣⎡0021⎦⎤=⎣⎡002−51⎦⎤=⎣⎡00−31⎦⎤
结果吻合!
关键点回顾
在 OpenGL 的这个例子中,体现了坐标变换的两个精髓:
- 逆向思维:World → Camera 本质上是把世界做了一个逆变换(T−1⋅R−1)。
- 基变换计算:利用正交矩阵的性质(R−1=RT),将相机的基向量作为行填入矩阵,即可完成旋转变换。
3️⃣FPS相机与轨道相机
轨道相机的本质是球坐标系 (Spherical Coordinates) 到 直角坐标系 (Cartesian Coordinates) 的转换。
假设我们盯着点Ptarget,距离为 R,角度为 θ(Pitch) ,我们要算出相机的位置Peye.
计算公式:
xyz=R⋅cos(θ)⋅cos(ϕ)=R⋅sin(θ)=R⋅cos(θ)⋅sin(ϕ)
这算出来的是相对于目标点的偏移量 (Offset)。所以,相机的最终位置是:
Peye=Ptarget+⎣⎡xyz⎦⎤
最直观的感受就是:
计算代码参考:
void Camera::updateViewMatrix() {
const float yawRad = qDegreesToRadians(m_yaw);
const float pitchRad = qDegreesToRadians(m_pitch);
const float cosPitch = qCos(pitchRad);
QVector3D forward(
qSin(yawRad) * cosPitch,
qSin(pitchRad),
qCos(yawRad) * cosPitch
);
forward.normalize();
m_position = m_target - forward * m_distance;
m_viewMatrix.setToIdentity();
m_viewMatrix.lookAt(m_position, m_target, m_up);
}