目录
本文主要记录多旋翼飞行器的笔记。
实验场地搭建:
5m x 7m x 2.2m 【长x宽x高】
- 电机拉力测试平台(515元,用于测试螺旋桨拉力和计算无人机力效)
【淘宝】7天无理由退货 https://e.tb.cn/h.7b0BVzqtVX0jNuF?tk=bEYFfr5mYYD HU293 「Mayatech MT10PRO+涵道航模桨电机拉力测试台10KG 拉力计电流功率」 点击链接直接打开 或者 淘宝搜索直接打开
- 螺旋桨静平衡器 (137元,调平螺旋桨平衡,降低无人机飞行时的震动和抖动)
【淘宝】7天无理由退货 https://e.tb.cn/h.7bb7N6pjJD7t1bX?tk=kGCWfr5AdL1 CZ356 「航模多功能平衡仪、航模螺旋桨平衡仪、直升机主旋翼重心定位仪」 点击链接直接打开 或者 淘宝搜索直接打开
- 航模遥控器(900 元)
【淘宝】7天无理由退货 https://e.tb.cn/h.7bbtAVMfRQqw6Lo?tk=Zks8frg7DQn HU287 「WFLY天地飞ET16S航模遥控器固定翼FPV穿越机兼容多协议黑羊高频头」 点击链接直接打开 或者 淘宝搜索直接打开
SLAM经典算法
mid360 复现https://github.com/hku-mars/FAST-LIVO2/issues/119
问题:
- 为什么多旋翼不适合推广到大型飞行器?
当桨叶变大,其转动惯量(Inertia) 会呈指数级增加。这意味着电机无法迅速改变桨叶的转速。
- 如何理解飞行器的失速? 机翼因角度过大(迎角超限)而导致机翼失去了足够的升力,无法再支撑飞行器的重量。
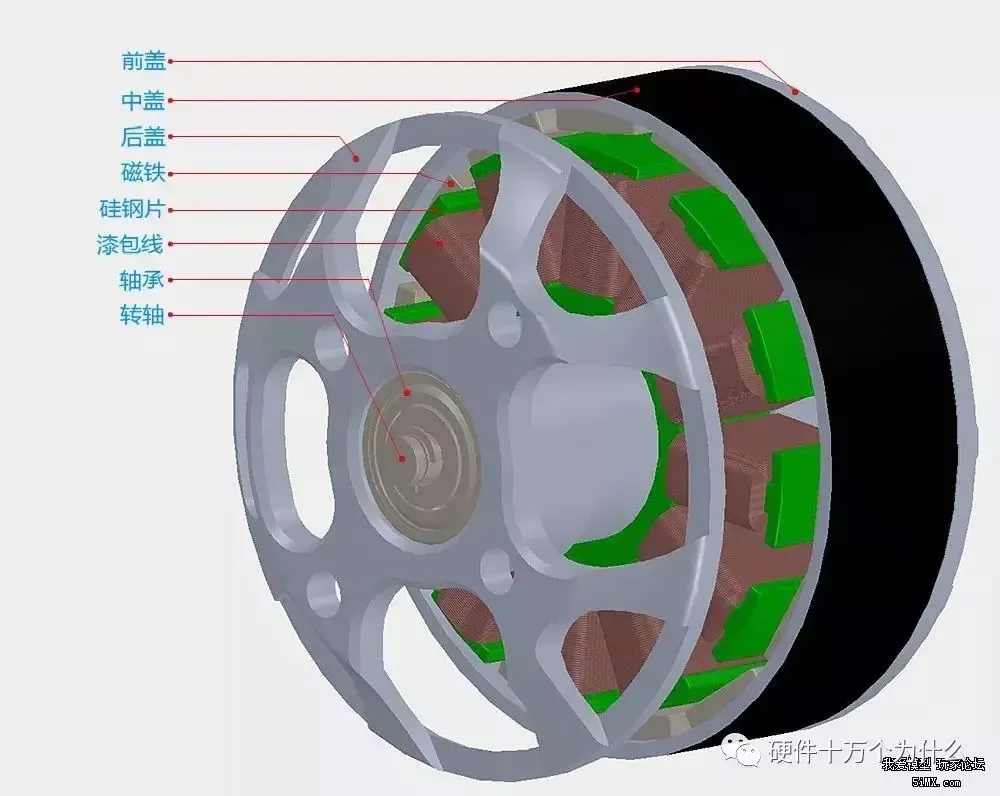
电机知识
无刷电机不论是外转子结构还是内转子结构旋转的都是磁铁。所以任何一个电机都是由定子和转子共同构成的。
无刷电机的定子是产生旋转磁场的部分,能够支撑转子进行旋转,主要由硅钢片、漆包线、轴承、支撑件构成;而转子则是黏贴钕铁硼磁铁,在定子旋转磁场的作用进行旋转的部件,主要由转轴、磁铁、支持件构成。除此之外,定子与转子组成的磁极对数还影响着电机的转速与扭力。
简单的一句话总结:磁极对数越多,电机转速越慢,扭力越大;磁极对数越少,电机转速越快,扭力越小。(这解释了为什么无人机电机的磁极对数比RC车的磁极对数多)
在交流电机(如感应电机、永磁同步电机 PMSM、无刷直流电机 BLDC)中,转速的理论公式为:
:表示同步转速(RPM)
:表示电源频率(HZ)
:磁极对数 (1p表示2个磁极)
结构原理图如下所示:

机架参数
轴距:两个对角螺旋桨的距离
布局: 除非特殊,一律选择 quad x布局
现在还有很多基于 X 型的改良布局,例如:
- Stretch X (长X): 缩短左右间距,拉长前后间距,为了高速直线竞速(减少扰流)。
- True X (正X): 正方形布局,手感最均衡,花飞首选。
- Dead Cat (死猫型): 前两个机臂角度张得更开,确保超广角镜头也拍不到桨叶(常见于 DJI Avata 或远航穿越机)。
空气动力学
计算叶尖雷诺系数:
:表示叶尖线速度,单位(), 螺旋桨最外边缘划过空气的速度
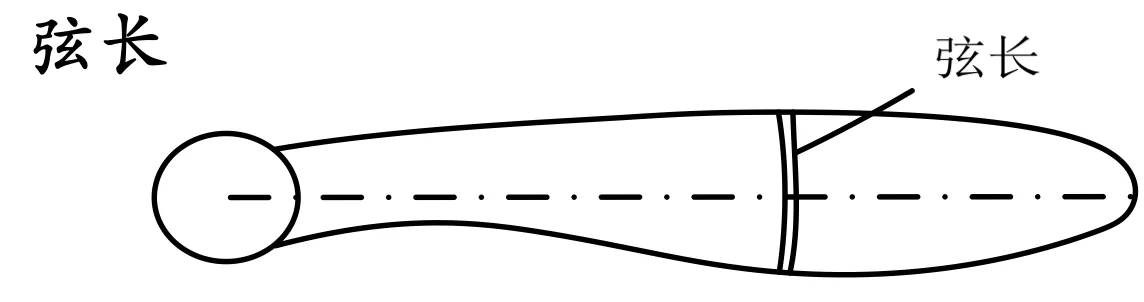
: 表示叶尖弦长,单位()
:表示空气运动粘度,单位(), 这是一个常数,取决于气温和海拔。标准海平面(15°C)下,
螺旋桨
📝:1英寸 = 2.54 厘米
命名规则: e.g 5045[x] 桨,前两个数字表示直径:5英寸,后两个数字表示螺距:4.5英寸, x表示叶数。 有R(如 5045R): 代表顺时针旋转(CW),通常叫“反桨”。【无人机必须买一对正桨、一对反桨才能飞,所以通常是成套卖的】
螺距:螺旋桨每转一圈,就会向前进一个距离,就称为螺距或桨距。
低螺距看起来比较平,切风时的阻力小,响应快,低速扭矩快,极速低。e.g 5030
高螺距看起来比较斜,转速提升慢,需要较大电流。 e.g 5050
弦长:螺旋桨叶片的“宽度”
桨叶数:数量越多,推力越大,效率越低。反之推力越小,效率越高。
转动惯量:计算公式(), 表示质量,表示距离旋转中心的距离。 转动惯量越大,越难旋转和停止。
无人机力效
通俗地说,力效就是:你每消耗 1瓦特(Watt)的电,能买来多少克(gram)的拉力?
数值越高,说明越省电,核心计算公式如下:
⚠️:力效这个数字不是固定的,它会随着油门大小、螺旋桨尺寸而剧烈变化。低油门区的力效更高
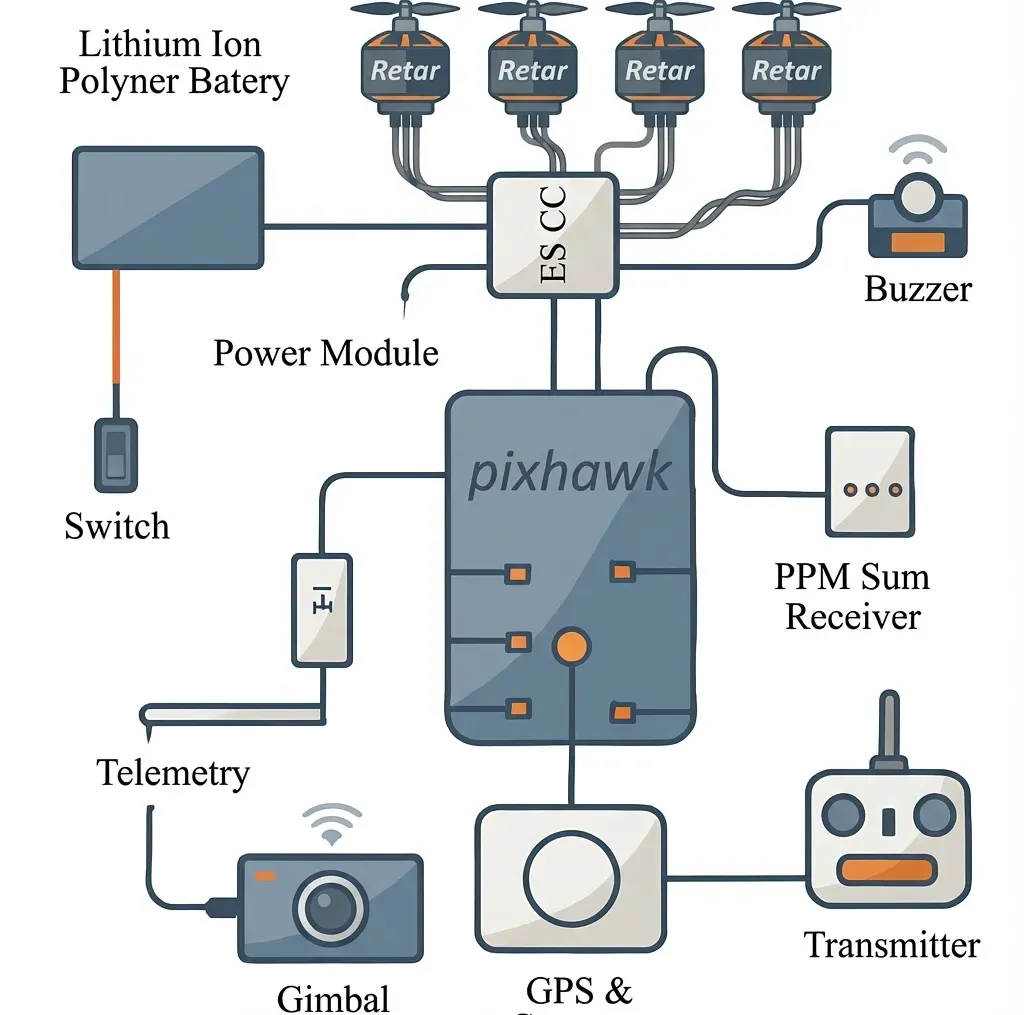
动力控制系统
电源线
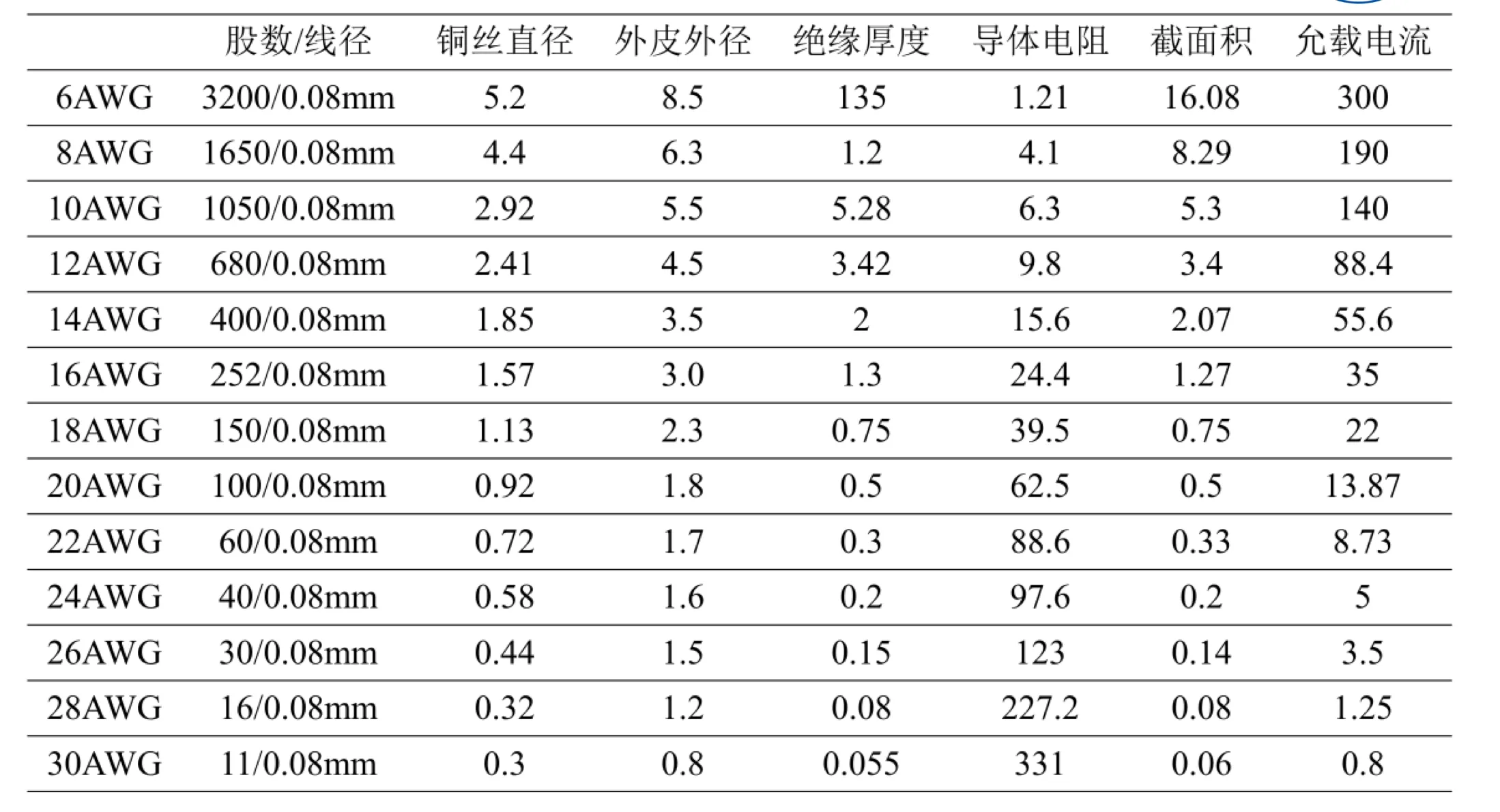
硅胶线:多股缠绕,可以通过很大的电流,同时又保证线材比较柔软;二是线皮用硅橡胶,非常柔 软,不过同时也很容易破损
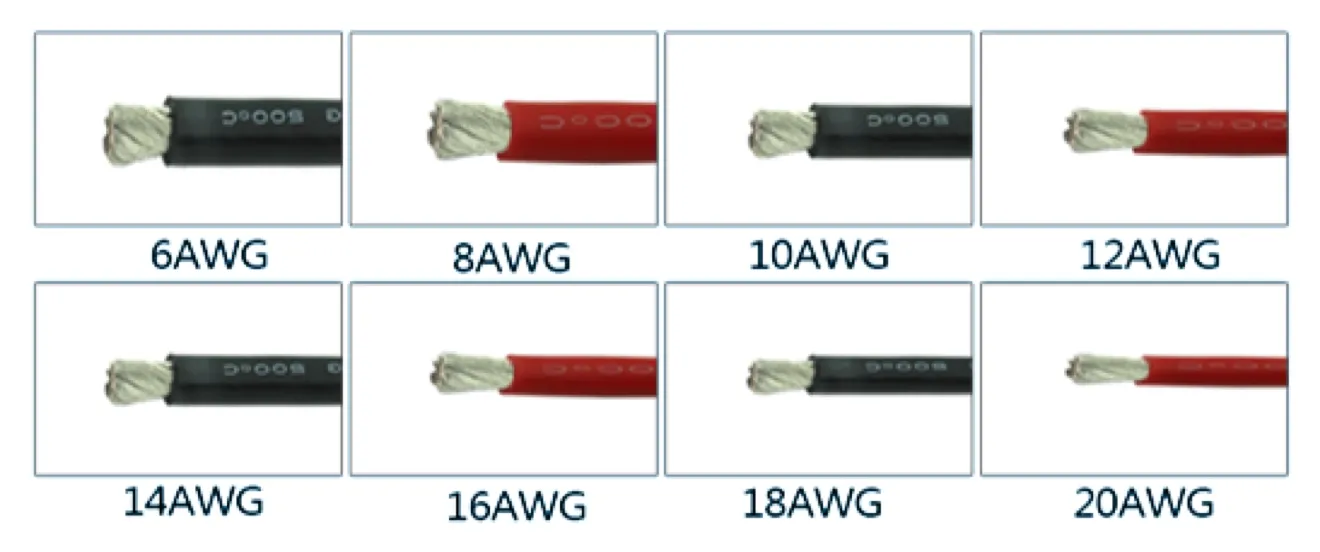 注:AWG越小,能通过的电流越大,参考如下:
注:AWG越小,能通过的电流越大,参考如下:
插头
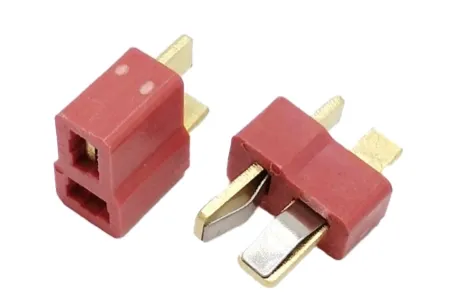
- T形头
一般使用T型头。一般电源上为母头,而电调上的为公头,适合较小电流的情况
2.XT60
可以通过60A以上的电流。其内部是两个香蕉头,适合较大电流的情况

3.AS150
额定电流为70A,瞬时电流为150A,最高可承受500V直流,具备防打火设计

图传解码算法比较
| 编码算法 | 压缩效率 | 典型总延迟 | 4K(3840×2160)所需带宽 | 1080p(1920×1080)所需带宽 | 备注 |
|---|---|---|---|---|---|
| H.264 (AVC) | 基准 | 80–150 ms | 20–40 Mbps | 6–12 Mbps | 最低延迟,兼容广,图传常用 |
| H.265 (HEVC) | 比 H.264 节省 30–50% | 120–200 ms(略高) | 12–25 Mbps | 3–8 Mbps | 高压缩率,但复杂度更高 |
| 专用低延迟编码(如 DJI 优化算法) | 接近 H.265 | 30–80 ms(行业最佳) | 10–20 Mbps | 4–8 Mbps | 深度优化延迟与抗干扰 |
系统通信协议
- 遥控器与接收器
- PPM(Pulse Position Modulation) :模拟信号,但通过一根线传输所有通道数据。比PWM简洁,但精度和抗干扰能力一般。
- SBUS (Serial Bus): 由Futaba开发,基于串口的数字协议。它使用反向电平,一根线可传输16-18个通道,延迟低,是目前最常用的协议之一。
- CRSF (Crossfire): 由TBS (Team BlackSheep) 开发的高速、双向数字协议。它是目前远航和穿越机的主流协议(如ExpressLRS也主要使用CRSF协议与飞控通信),具有极低的延迟和带宽,支持OTA固件升级和参数调整。
- 飞控与电调
- Standard PWM: 传统的模拟信号(1ms-2ms脉宽),刷新率低(50Hz-400Hz),响应慢。
- DShot (150/300/600/1200): 目前的绝对主流。这是一种数字协议。 抗干扰能力强,无需校准行程,支持反乌龟模式(电机反转),且可以通过电调回传转速信息。数字越大代表传输速度越快(如DShot600)。
- 控与板载传感器/外设通信(内部总线)
- I2C (Inter-Integrated Circuit): 通用串行总线。常用于连接磁力计(罗盘)、气压计以及部分旧型号的陀螺仪。优点是只用两根线(SDA, SCL)挂载多个设备,缺点是速度相对较慢,抗干扰差。
- SPI (Serial Peripheral Interface): 高速同步串行接口。目前高性能飞控主要使用SPI连接陀螺仪(如MPU6000, BMI270)和SD卡槽。SPI拥有比I2C高得多的带宽,能满足8KHz甚至32KHz的PID循环频率需求。
- UART (Universal Asynchronous Receiver/Transmitter): 也就是串口。这是飞控上最通用的接口,用于连接GPS、数传电台、接收机、激光雷达等。
- 飞控与地面站通信
- MAVLink (Micro Air Vehicle Link): 开源无人机领域(ArduPilot, PX4)的行业标准。它是一种极其强大、轻量级的消息传输协议,用于飞控与地面站(如Mission Planner, QGroundControl)以及机载电脑(如树莓派、Jetson)之间的双向通信。
- MSP (MultiWii Serial Protocol): 主要用于Betaflight/Cleanflight/iNav固件。用于飞控参数配置、OSD设置。相比MAVLink更轻量,但功能偏向于穿越机和竞速调整。
本文作者:James
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!