目录
ULIP(Unified Language-Image-Point cloud representation)旨在学习一个统一的表示空间,将三种不同的数据模态——语言(Text)、图像(Image)和点云(Point Cloud)——映射到同一个特征空间中。其核心思想是利用已经在大规模2D图文数据上预训练好的模型(如CLIP),将3D点云的特征与已经对齐好的图文特征进行对齐。
通过这种方式,ULIP成功地将3D表示与丰富的2D视觉和语言语义联系起来,从而实现了强大的零样本(Zero-shot)3D理解能力。例如,模型在没有见过任何3D标注数据的情况下,仅通过文本描述(如“一张红色的椅子”)就能对3D点云进行分类或检索。
论文核心思想
ULIP的解决思路非常巧妙,它并没有直接去收集海量的(点云,文本)数据对,而是利用 2D图像作为“桥梁” 来连接3D点云和文本。
具体步骤如下:
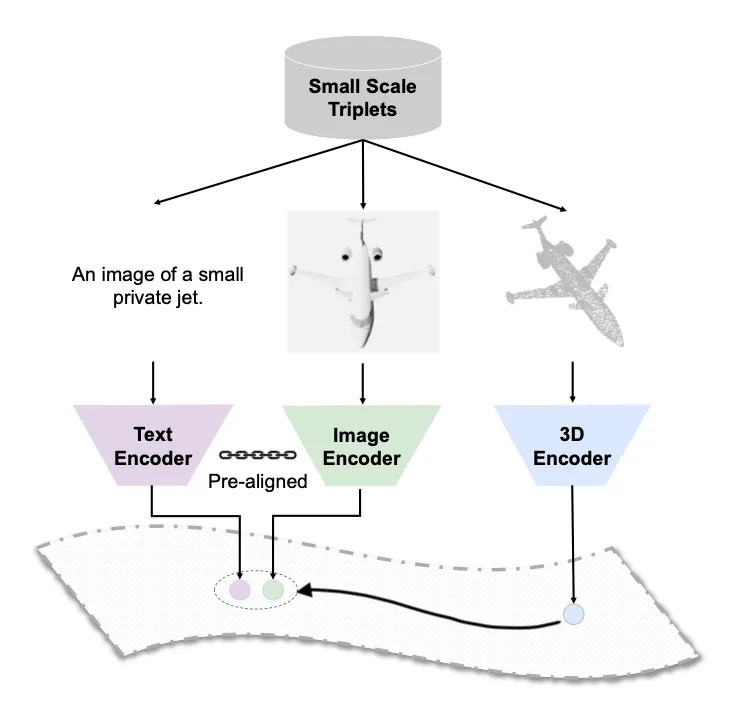
1.利用现成的图文对齐能力: 直接采用一个预训练好的、且权重被冻结的CLIP模型。这个模型已经建立了一个稳固的、语义丰富的图文联合表示空间。 创建(点云,图像,文本)三元组: 对于一个3D物体(如ShapeNet数据集中的椅子模型),可以: 获取其点云表示。
2.通过渲染(rendering)技术,从不同视角生成该物体的2D图像。 为其匹配相应的文本描述(例如,直接使用物体的类别名 "chair")。 对齐3D与2D/文本: 训练一个点云编码器,其目标是使其提取的3D特征,能够与CLIP模型提取的对应图像特征和文本特征在同一个空间中对齐。
3.通过这种方式,点云特征被“拉拢”进了CLIP已经建立好的语义空间,从而间接实现了与文本和图像的对齐。详情如图:
方法介绍
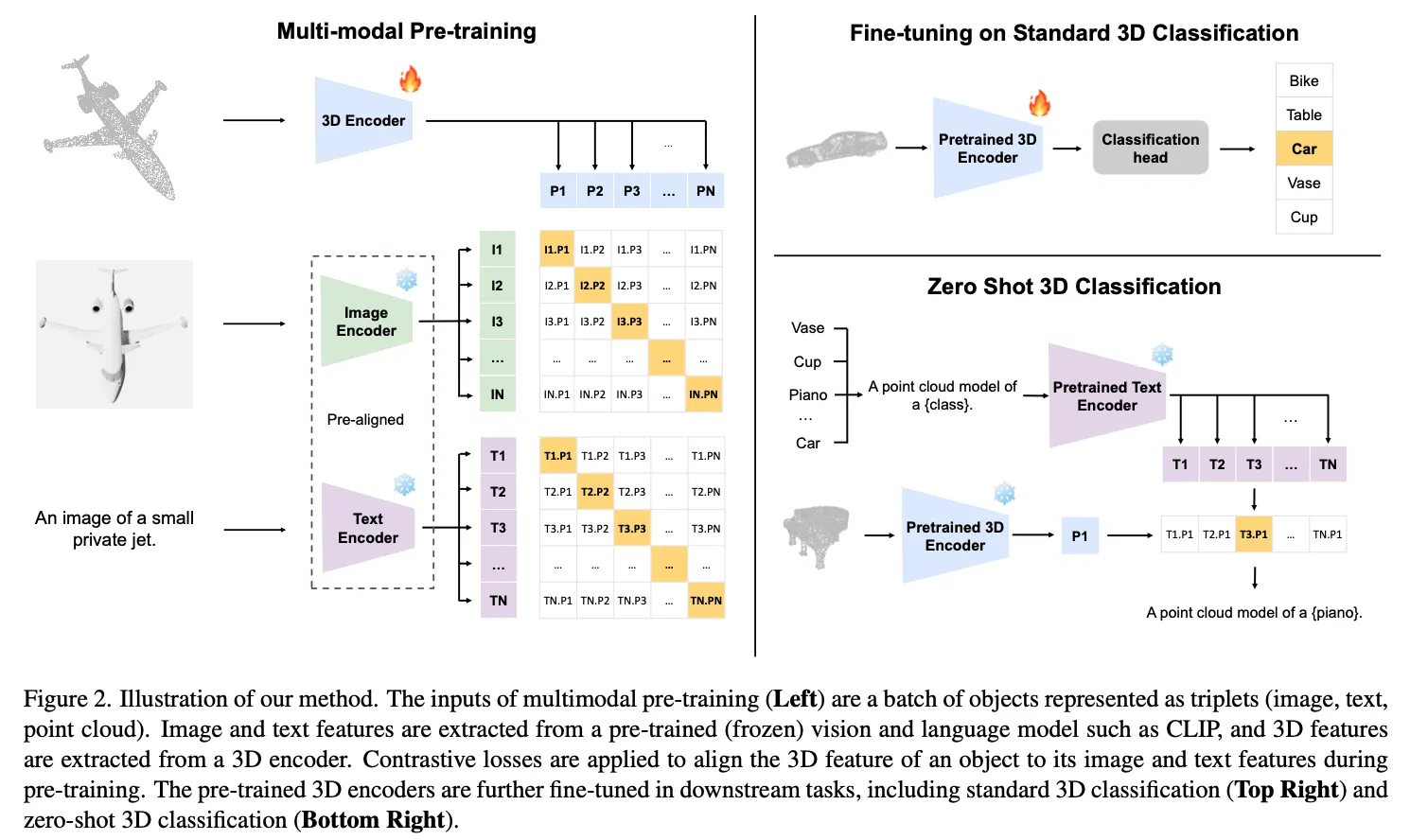
ULIP的架构主要由三个部分组成,分别对应三种模态的编码器: 文本编码器 (Text Encoder),图像编码器 (Image Encoder),点云编码器 (Point Cloud Encoder)。
在训练过程中,文本和图像编码器权重固定不变,只有点云编码器和投影矩阵(将点云特征投影到和其他模态一样的特征性状)可以训练。
整体流程图如下:
1.特征提取
首先看第一个公式,表示3D点云的backbone, 是点云输入,表示提取的点云特征。
第二个公式是图像特征提取,输入的是图像,表示图像编码器,比如viT,输出的是图像特征向量。但是需要注意的是,这里的图像是通过点云渲染的(参考了pointClip),利用不同角度对点云渲染,训练的时候随机抽取一张图像输入。
第三个公式表示文本特征提取,这里的不是一个句子,而是一组模板句子,所以是一个集合。通过文本编码器得到一组特征,再通过平均池化,得到文本特征.
2. 模态对齐
这里使用的是经典的对称性对比损失函数(Symmetric Contrastive Loss),通常被称为 InfoNCE Loss 的一种变体。
上面的公式看着比较复杂,实际上比较简单。我们可以简化一下:
这两个公式是等价的,表示两种模态的对称损失。
- 表示两个模态归一化的向量点积,等价于余弦相似度。
- τ(tau): 称为温度系数 (temperature parameter)。这是一个可学习的或固定的超参数。作用是缩放 (scale) 相似度得分。一个较小的 τ会使得相似度分布更加“尖锐”,模型会更关注于区分那些特别难分的负样本。一个较大的 τ则会使分布更“平滑”。
- exp 表示指数函数,其实就是softmax函数,将相似度转化为了概率分布。
再看下面的公式:
将几个模态之间的损失函数相加,α 被设为常数 0,β 与 θ 均设为 1;因为在预训练阶段发现,如果更新 CLIP 的图像和文本编码器,由于数据量有限,容易出现灾难性遗忘现象。这会导致在将 ULIP 应用于下游任务时性能显著下降。因此,我们在整个预训练过程中冻结 fS(·) 和 fI(·) 的权重,只用 Lfinal 更新 fP(·)。
本文作者:James
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!